$Bellman-Ford、SPFA、Dijkstra$这些单源最短路算法自己一直都在用,但有时候只是需要的时候拿出来当板子敲上去,没有什么深刻的理解,今天花了一下午把这些算法的原理和一些细节基本搞通了,总结一下。
$PS:Floyd-Warshall$多源最短路算法受限于自己对DP的理解,还没有完全搞明白= =,之后再来填坑。
Bellman-Ford代码、Dijkstra理解和代码部分参考自《挑战程序设计竞赛》。
限制和复杂度
$Bellman-Ford$:不含负圈(可判断出)。运行时间:$O(|V|*|E|)$。
$SPFA$:不含负圈(可判断出)。运行时间:$O(k*|E|)$,一般情况下$(k <<|V|)$,可以认为近似线性。
$Dijkstra$:不含负权边。运行时间:$O(|E|*|log|V|)$(优先队列实现)
Bellman-Ford
$Bellman-Ford$算法思想是更新所有的边,每条边都更新$|V|-1$次,由于多余的更新操作是无害的,所有算法可以求得最短路,但同时不可避免的有复杂度冗余的问题。
先说一下为什么是更新$|V|-1$次:
首先每一个节点$v$都有一条相对于起点$s$的最短路,因为最短路是简单路径不包含环(如果是负环,最短路不存在;如果是正环,去掉后变短;如果是零环,去掉后不变),所以节点总数为$|V|$的情况下最长的那条最短路的长度不会超过$|V|-1$,又因为每更新一次都必然会确定最短路径上的一条线段,所以最多只需要更新$|V|-1$次,反之,如果更新次数超过$|V|-1$次则说明图中有负环最短路不存在,可以利用这一点来判断图中是否有负环。
关于“每更新一次都必然会确定最短路径上的一条线段“的进一步解释:
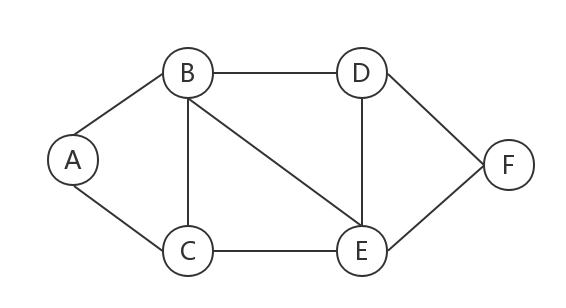
以上图为例,假设上图中的最长的一条最短路为$A->F$的最短路
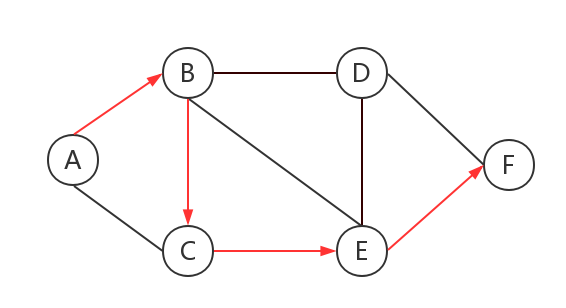
从原点$A$开始出发,每次进行所有边的更新,第一次更新结束后$A->B$的最短路确定,第二次更新结束后$A->C$的最短路确定,以此类推四次后这条最长的最短路确定。因为这条最短路是最长的,所以在它确定时其它较短的最短路也肯定已经确定。所以在至多$|V|-1$次更新后$Bellman-Ford$算法可以找到任意一条最短路。
$Bellman-Ford$代码:
1 | //从顶点from指向顶点to的权值为cost的边 |
SPFA
$SPFA$算法可以用一句话概括:”只有被更新了的节点才有资格更新其它节点“。因为如果一个节点自身没有被更新的话,那用它更新与它相邻的其它节点也不会产生新的结果。它用队列来维护那些被更新了节点。值得注意的是虽然一般情况来说$SPFA$的复杂度接近线性,但它不稳定,可以构造出特殊的图使得SPFA的复杂度变为和$Bellman-Ford$一样。
$SPFA$代码:
1 | struct edge{ |
Dijkstra
考虑没有负边的情况。在$Bellman-Ford$算法中,如果$d[i]$还不是最短距离的话,那么即使进行$d[j]=d[i]+l(i, j)$的更新,$d[j]$也不会变成最短距离。而且,即使$d[i]$没有变化,每一次循环也要检查一遍从$i$出发的所有边。这显然是很浪费时间的。因此可以对算法做如下修改:
- 找到最短距离已经确定的顶点,从它出发更新相邻的顶点的最短距离。
- 此后不需要再关心$1$中的”最短距离已经确定的顶点“。
在$1$和$2$中提到的”最短距离已经确定的顶点“要怎么得到是问题的关键。在最开始时,只有起点的最短距离是确定的。而在尚未使用过的顶点中,距离$d[i]$最小的顶点就是已经确定的顶点。这是因为由于不存在负边,所以$d[i]$不会在之后的更新中变小。
$Dijkstra$代码:
1 | struct edge{ |